Hector 9000 ist ein Cocktailautomat, der 12 verschiedene Getränke
dosieren kann. Entstanden ist Hector 9000 Anfang 2018 als Nachfolger
von Onkel Hector, einem reinen Gin-Tonic-Automaten. Bei der
Entwicklung wurde versucht, möglichst viele Teile durch 3D-Druck, ohne
Support, herzustellen.\
Im Gegensatz zu vielen anderen Barbots werden keine Peristaltikpumpen
verwendet, wodurch eine Förderung von kohlensäurehaltigen Getränken
möglich ist. Die Flüssigkeiten werden durch einen leichten Überdruck
in den Flaschen gefördert, gleichzeitig wird die geförderte Menge
durch eine Waage ermittelt. Ist genug von einem Getränk dosiert
worden, werden die zum Getränk gehörigen Silikonschläuche
abgequetscht. Die Getränke kommen dabei nicht mit beweglichen Teilen
in Berührung. Ist ein Cocktail fertiggestellt, betätigt Hector seine
Glocke.\
Das Herz von Hector 9000 ist ein Raspberry Pi 3B. Der Pi übernimmt die
Ablaufsteuerung und stellt auf einem 7"-Touch-Display das UI dar. Die
Software ist in Python 3 geschrieben, zur grafischen Darstellung wird
Javascript und HTML genutzt.
1 - Mechanik
Waage
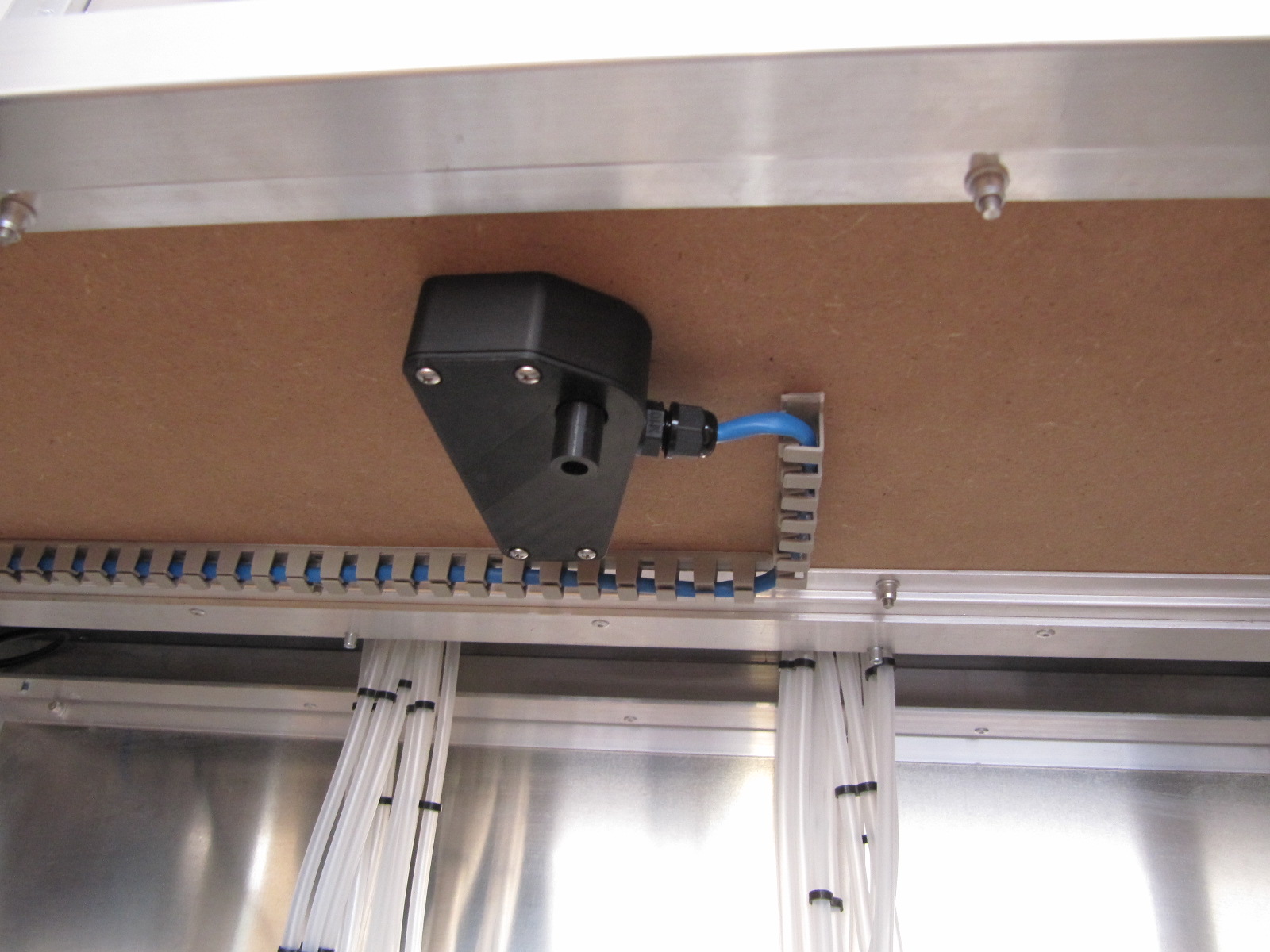
Um die dosierten Mengen zu ermitteln, wird eine Wägezelle in Verbindung
mit einem HX711 verwendet. Vor der Montage der gedruckten
Kunststoffteile muss der Überlauf in die Waagschale eingeklebt werden.
Die Befestigung der Waage erfolgt von oben durch die Tischplatte. Der
Abstandshalter und der Überlauf müssen abhängig von der Dicke der
Tischplatte angepasst werden, zwischen Tischplatte und Waagschale sollte
ein Spalt von 1 mm sichbar sein. Als Anschlusskabel wurde ein
CAT5e-Kabel verwendet. Auf der Unterseite des Gehäuses besteht die
Möglichkeit, einen Schlauch mit 10 mm Innendurchmesser für den Überlauf
anzuschließen. Für die Montage der Waage hat sich folgende Reihenfolge
bewährt:
Kabelverschraubung im Gehäuse befestigen,
Gehäuse und Wägezelle unter der Tischplatte positionieren,
Wägezelle von oben anschrauben,
Abstandshalter und Waagschale befestigen,
Kabel verlöten,
Deckel verschrauben.
Pumpe
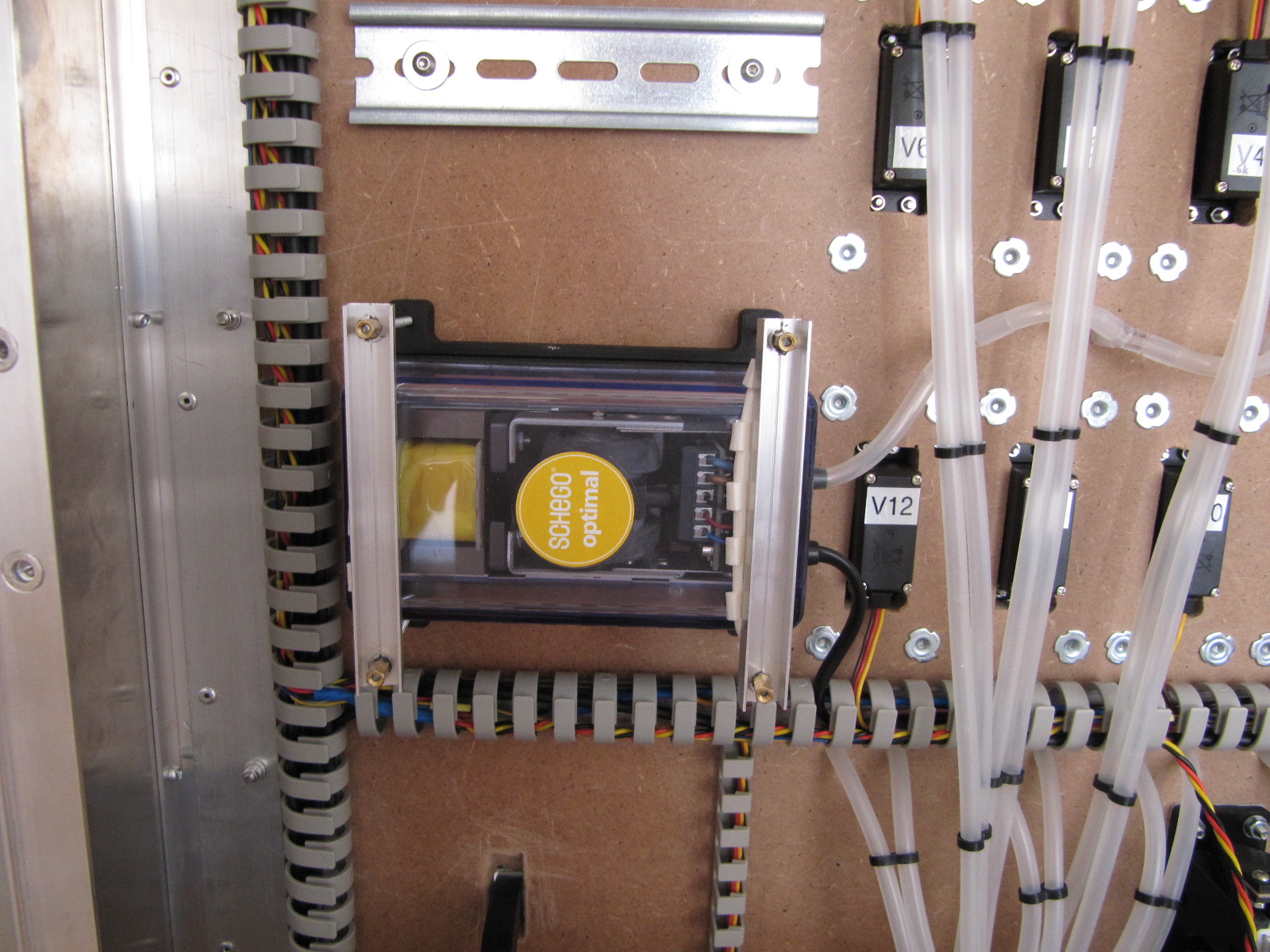
Um den Überdruck in den Flaschen zu erzeugen, verwenden wir eine
Luftpumpe für Aquarien. Da die komplette Elektronik mit max. 12 VDC
laufen soll, haben wir uns für eine 12V-Pumpe von Schego entschieden.
Die Auswahl der Pumpe ist relativ unkritisch, da der benötigte Überdruck
und die Fördermenge gering sind. Es sollte lediglich darauf geachtet
werden, dass die Pumpe ölfrei arbeitet. Da die Pumpe nur über ein
einziges Loch zur Befestigung verfügt, wurde eine Halterung konstruiert.
Folgende Reihenfolge bei der Montage hat sich bewährt:
Jeweils an einem Ende der Gewindestangen 2 Muttern aufschrauben und
kontern. Eine Mutter sollte bündig mit der Gewindestange
abschließen, die Schlüsselflächen der Muttern müssen in einer Flucht
stehen.
Gewindestangen in die dafür vorgesehenen Löcher stecken,
Halterung im Gehäuse festschrauben,
Pumpe einsetzen und mit den U-Profilen festklemmen (optional mit
Moosgummistreifen unter den U-Profilen),
Muttern an den U-Profilen kontern oder mit Loctite verkleben.
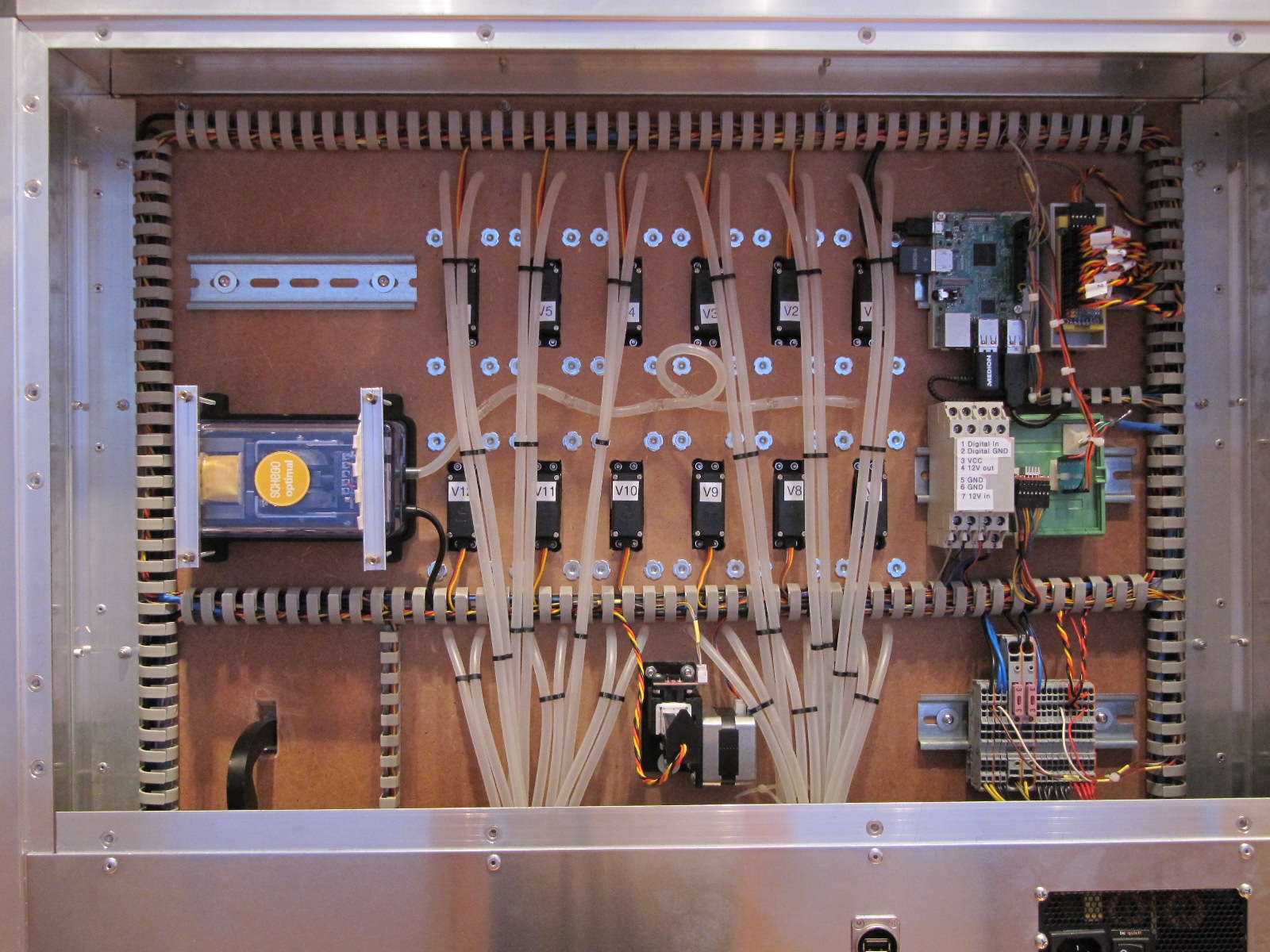
Ventile
Um die Dosierung der Flüssigkeiten zu realisieren, wurden für unseren
Cocktailautomaten Quetschventile konstruiert, welche immer beide
Schläuche (Luft und Flüssigkeit) einer Zutat gleichzeitig öffnen bzw.
schließen.
Die benötigten Kunststoffteile für die Ventile können ohne Support
gedruckt werden. Die (optionale) Abdeckung wurde für unseren Automaten
mit einem CO~2~-Laser aus transparentem PMMA geschnitten. Es ist darauf
zu achten, dass die Servos originale TowerPro MG996R sind. Es gibt
Servos mit gleicher Bezeichnung von No-Name-Anbietern, aber diese Servos
können sich in den Außenabmessungen teilweise erheblich von den
originalen Servos unterscheiden. Die bei den Servos mitgelieferten
runden Servoarme müssen auf den Innendurchmesser der Nocken angepasst
werden. Hierbei ist besondere Sorgfalt notwendig: Sitzen die Servoarme
exzentrisch im Nocken, wird das Ventil nicht richtig absperren. Unsere
Servoarme wurden auf einer CNC-Fräse mit einem sehr scharfen Holzfräser
bearbeitet. Die Befestigungslöcher für die Servoarme werden am besten
gebohrt, indem der Nocken als Schablone genutzt wird. Die Schrauben zur
Verbindung von Nocken und Servoarm werden mit Loctite gesichert. Bei den
Zungen ist darauf zu achten, dass sie aus einem Material mit guten
Gleiteigenschaften gefertigt werden. Unsere Zungen wurden aus Iglidur
I150 gedruckt. Die Zungen in den Ventilen von Onkel Hector haben schon
einige hundert Zyklen hinter sich und funktionieren immer noch
einwandfrei. Alternativ könnten die Zungen aus PET gedruckt werden, dies
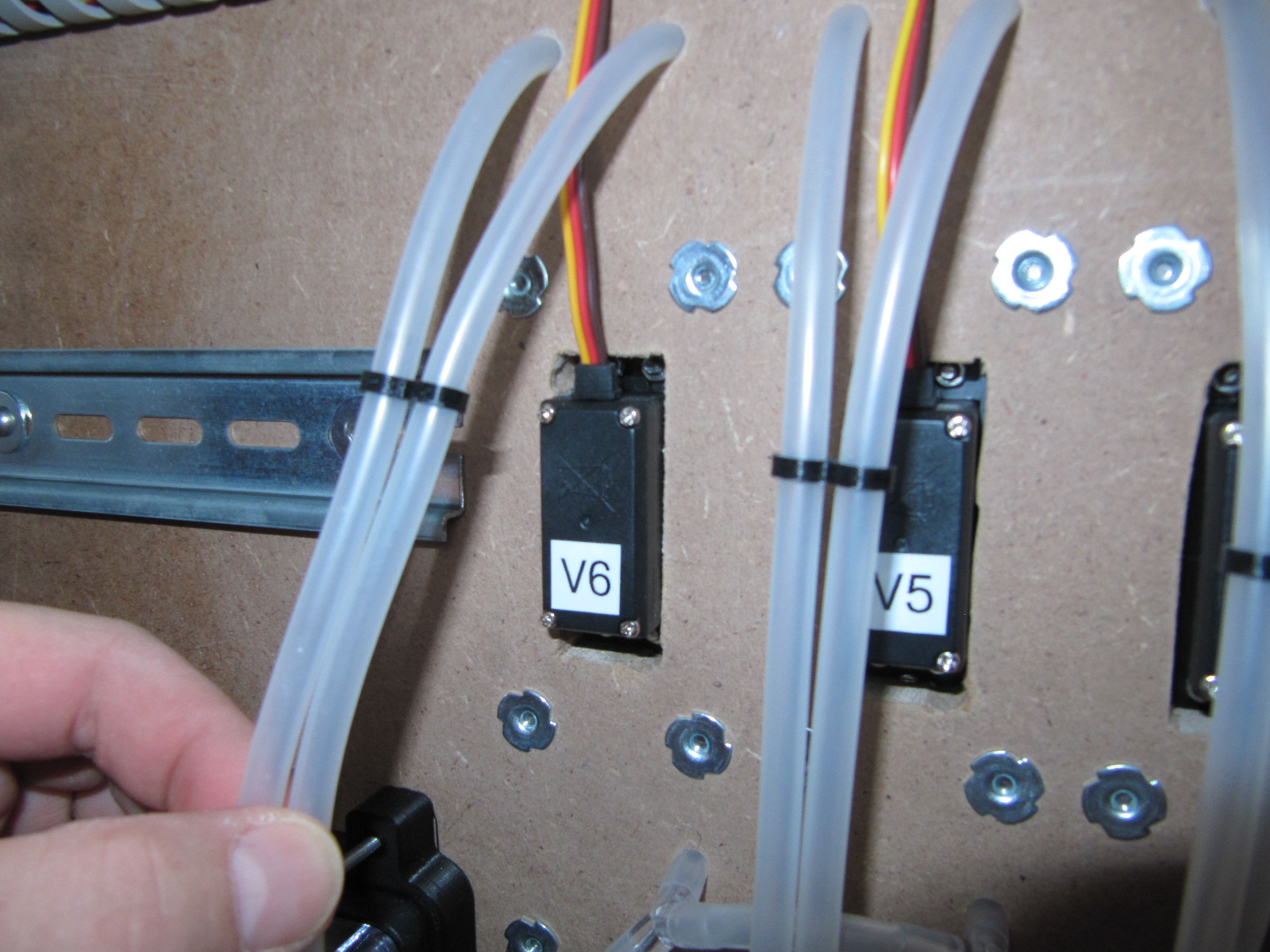
wurde allerdings noch nicht getestet. Damit die Ventile bündig mit der
Rückwand sitzen, müssen Auschnitte für die Servos hergestellt werden
(Abb. 4).
Zur Befestigung der Ventile haben sich Einschlagmuttern bewährt.
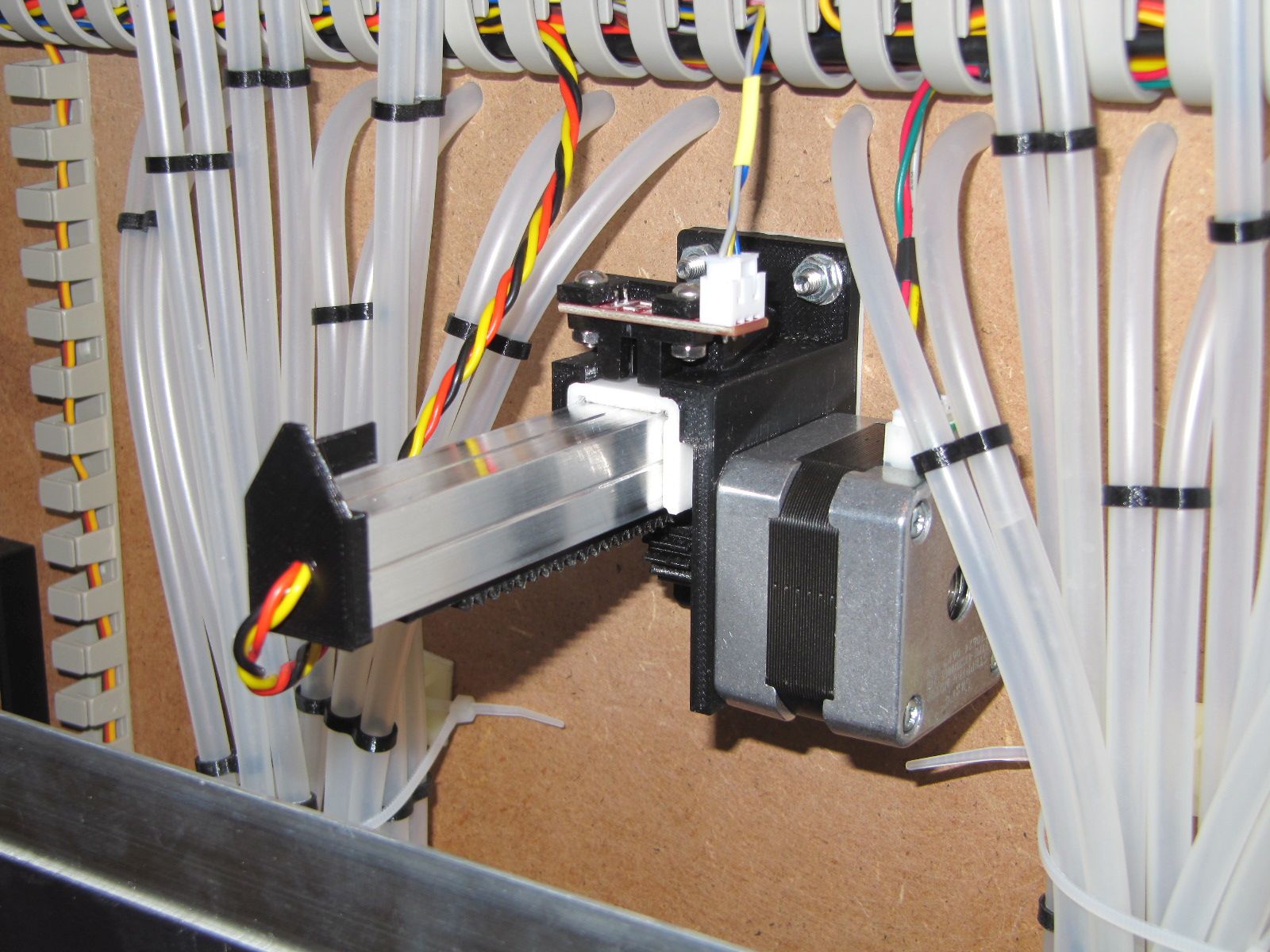
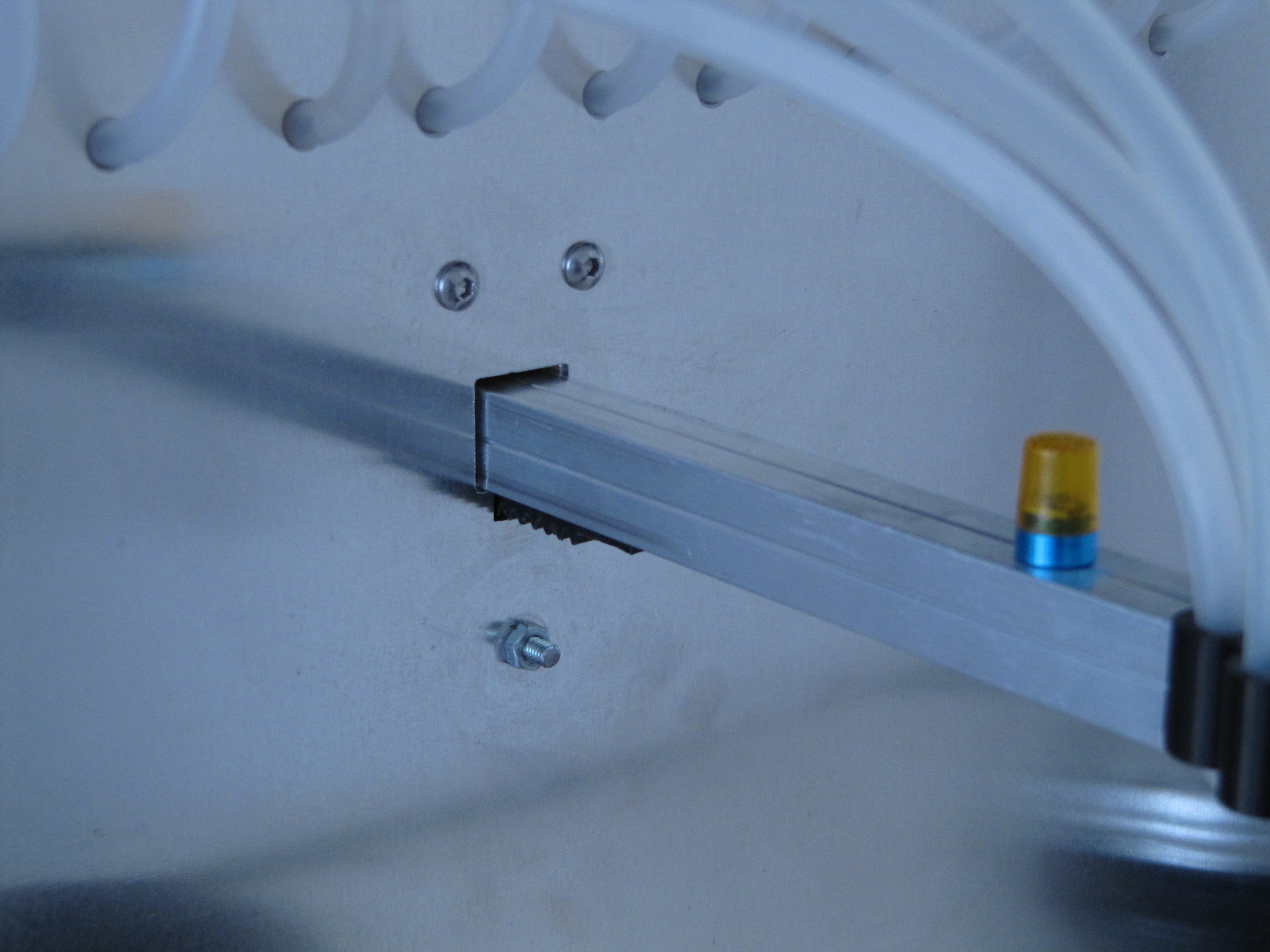
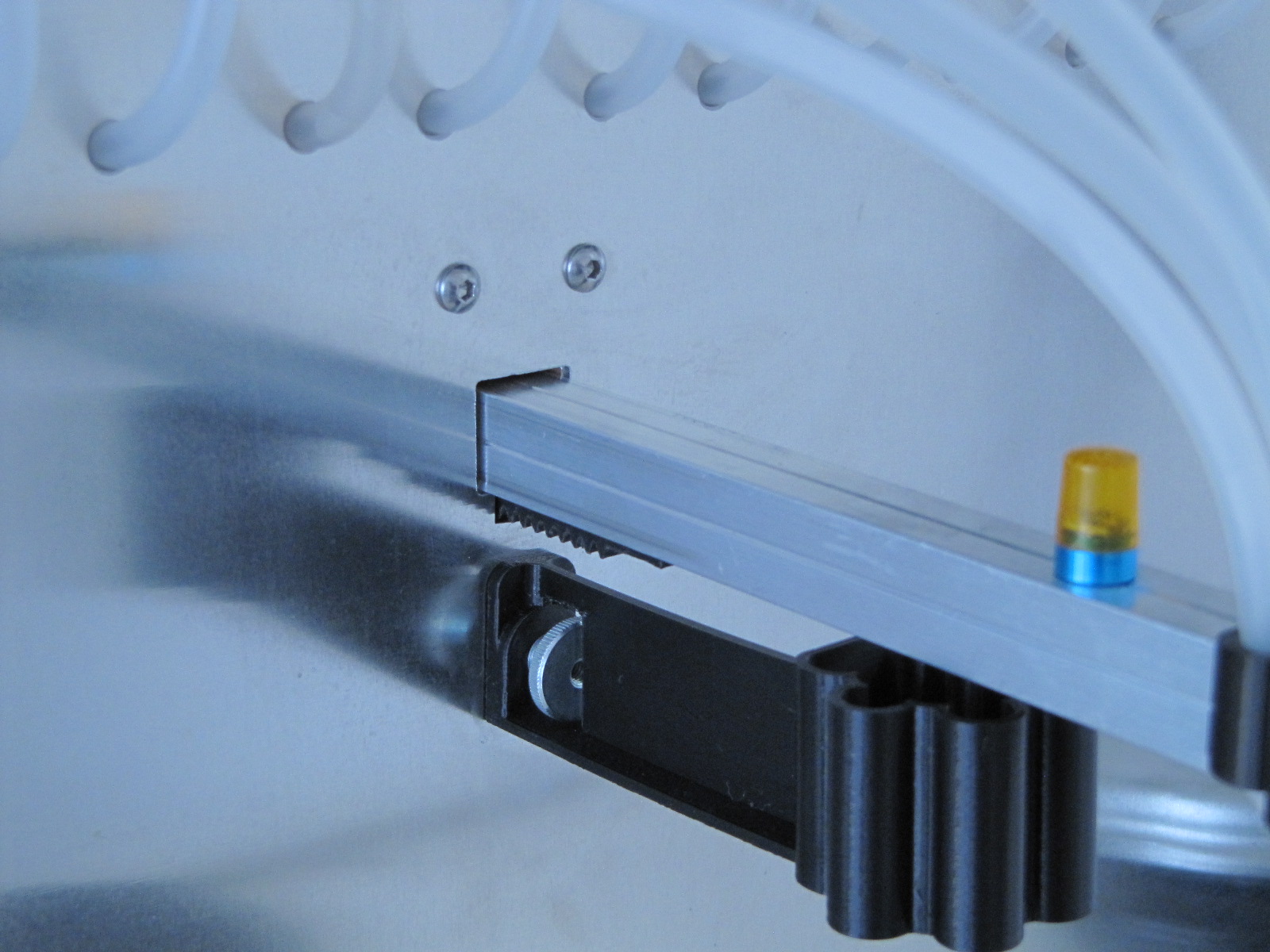
Arm
Um den Füllvorgang komfortabler zu gestalten, ist der Arm mit dem
Dosierkopf im Normalzustand eingefahren (Abb.
[arm_front_in]). Wird der Dosiervorgang gestartet, fährt der
Arm nach vorne. Alle benötigten Kunststoffteile lassen sich ohne Support
drucken. Der Gleiteinsatz sollte aus einem Material mit guten
Gleiteigenschaften gefertigt werden. Unser Gleiteinsatz wurde aus
Iglidur I150 gedruckt. Alternativ könnte der Gleiteinsatz aus PET
gedruckt werden, dies wurde allerdings noch nicht getestet. Der Ausleger
besteht aus einem Aluminiumprofil mit 15.5 mm Kantenlänge. Solche
Profile sind in fast jedem deutschen Baumarkt zu finden. Das Ritzel wird
auf die Welle des Motors gepresst und braucht keine weitere Sicherung.
Um die Zahnstange an dem Ausleger zu befestigen, wurden
M3-Blindnietmuttern in das Profil eingesetzt. Der Dosierkopf wird mit
einer selbstschneidenden Schraube im Profil gesichert. Der Auslöser wird
mit dem Ausleger verklebt. Der Auslöser weist ein Loch auf. Durch dieses
Loch wurde ein Kabel geführt, um ein optionales Rundumlicht auf dem Arm
mit Strom zu versorgen.
Bei der Montage des Arms ist darauf zu achten, dass die untere Schraube
von hinten durch die Bohrung geführt und mit einer regulären Mutter
festgeschraubt wird. Die oberen Schrauben werden von vorne durch die
Rückwand gesteckt und verschraubt. Auf der unteren Schraube kann nun mit
einer Rändelmutter der Tropfenfänger montiert werden (Abb.
[drip]).
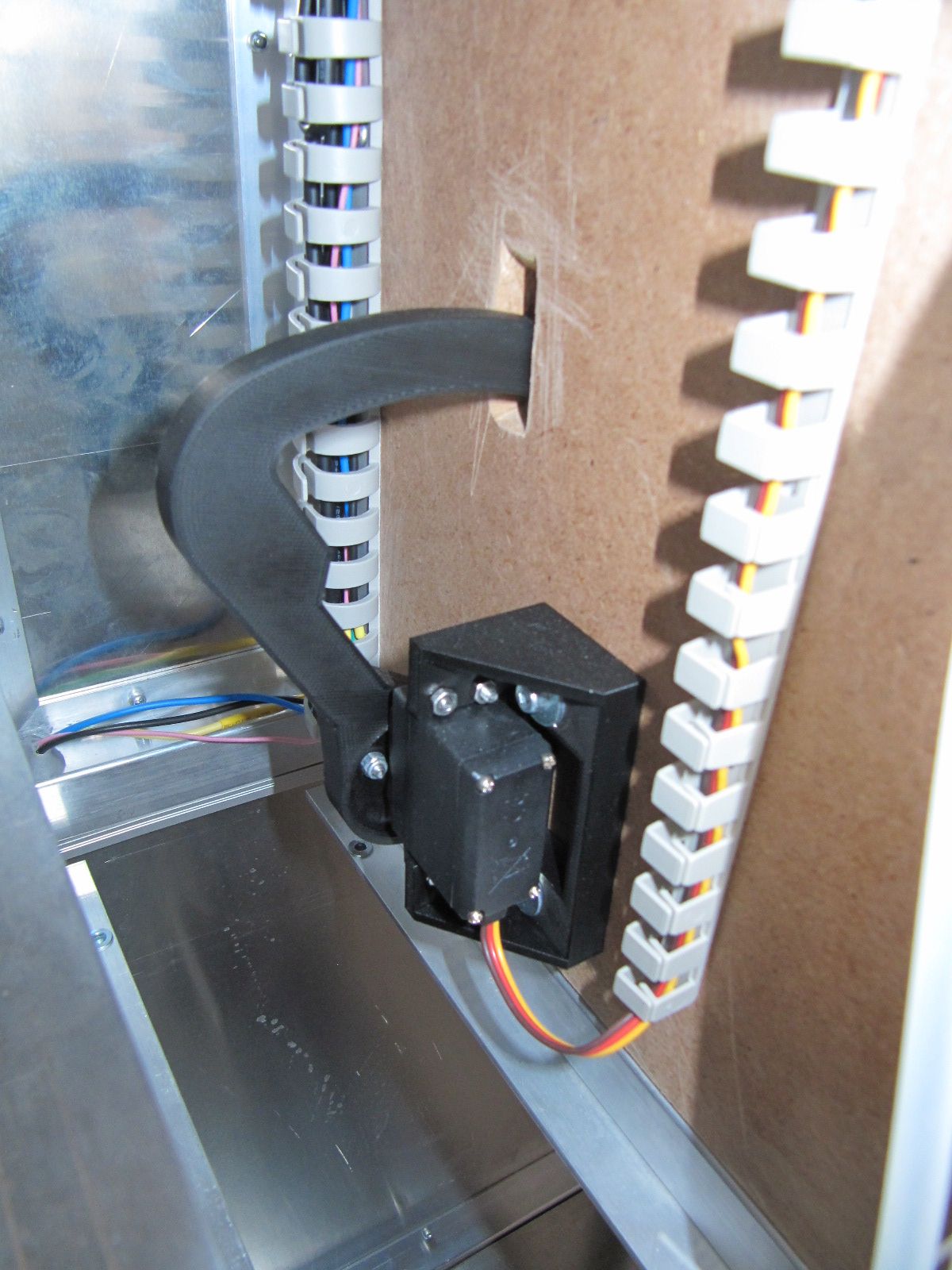
Glocke
Bei dem Nachbau der Mechanik für die Glocke ist darauf zu achten, dass
der Mittelpunkt der Glocke 100 mm von der Drehachse des Arms entfernt
ist. Zur Befestigung der Glocke ist eine Halterung vorgesehen (Abb.
6{reference-type=“ref” reference=“bell_mount”}). Um die
notwendigen Löcher in die Glocke zu bohren, wird die Halterung als
Bohrlehre benutzt. Die Montage des Fingers an der Rückwand ist
eigentlich selbsterklärend. Zur Befestigung der Motorhalterung
(Bell_servo-bracket.stl) an der Rückwand ist es ratsam, Einschlagmuttern
oder Gewindeeinsätze zu verwenden, so kann der Finger später leicht
justiert werden (Abb. 8).
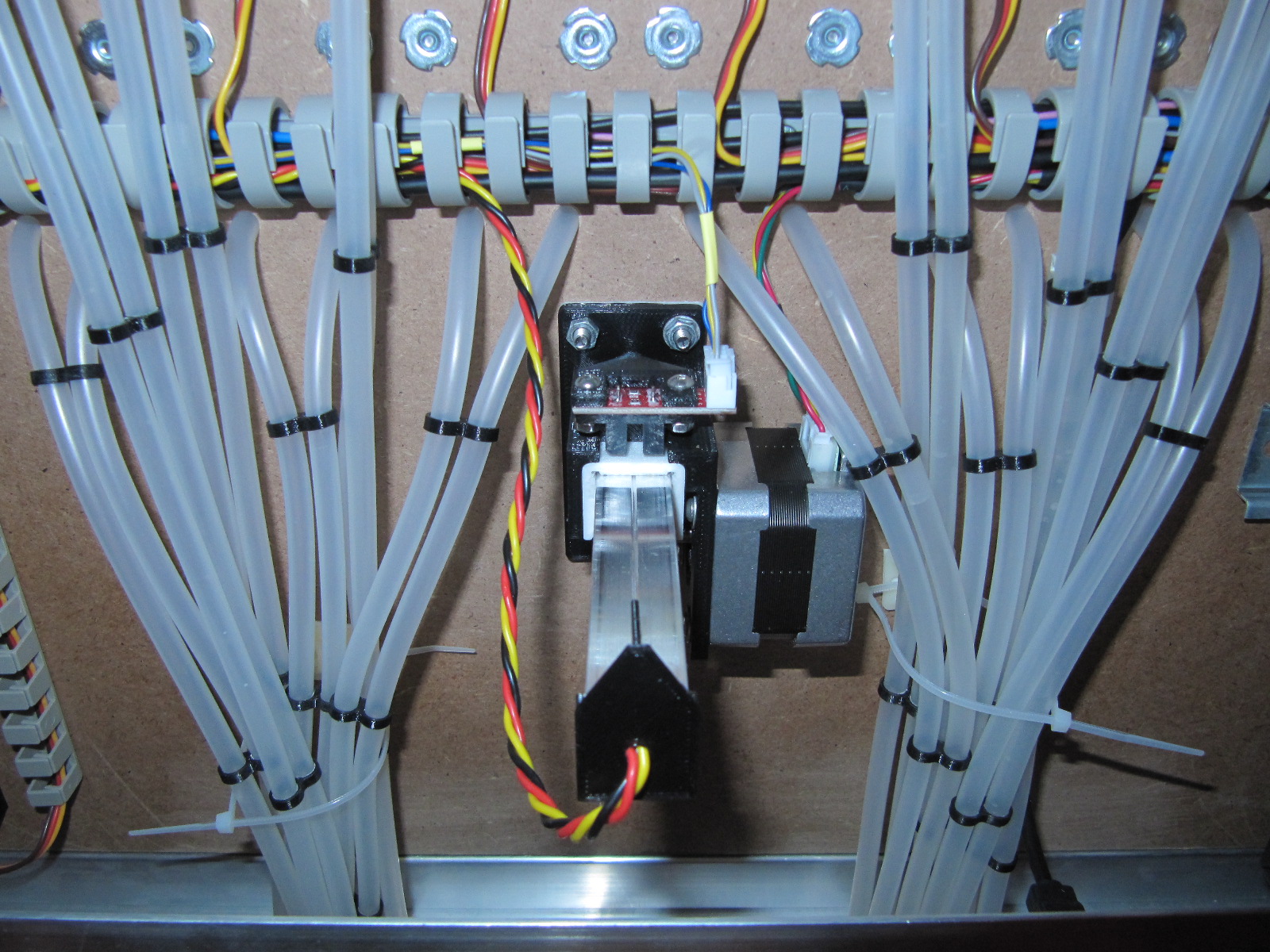
Schläuche
Um Flüssigkeiten und Luft zu transportieren, werden Silikonschläuche mit
6 mm Außendurchmesser und 4 mm Innendurchmesser verwendet. Es muss auf
jeden Fall darauf geachtet werden, dass die Schläuche für den Einsatz
mit Lebensmitteln vorgesehen sind. Um die Schläuche durch das Gehäuse,
die Ventile und den Dosierkopf zu führen, hat es sich bewährt, ein Ende
schräg abzuschneiden. Pro Zutat werden zwei Schläuche durch ein Ventil
geführt. Ein Schlauch leitet die Flüssigkeiten von der Flasche zum
Dosierkopf, der andere Schlauch verbindet Luftpumpe und Flasche. Bei der
Verlegung der Schläuche im Gehäuse muss darauf geachtet werden, dass
sich die Schläuche nicht mit dem Arm verheddern. Wir haben dafür einfach
Kabelbinder benutzt (Abb. 9).
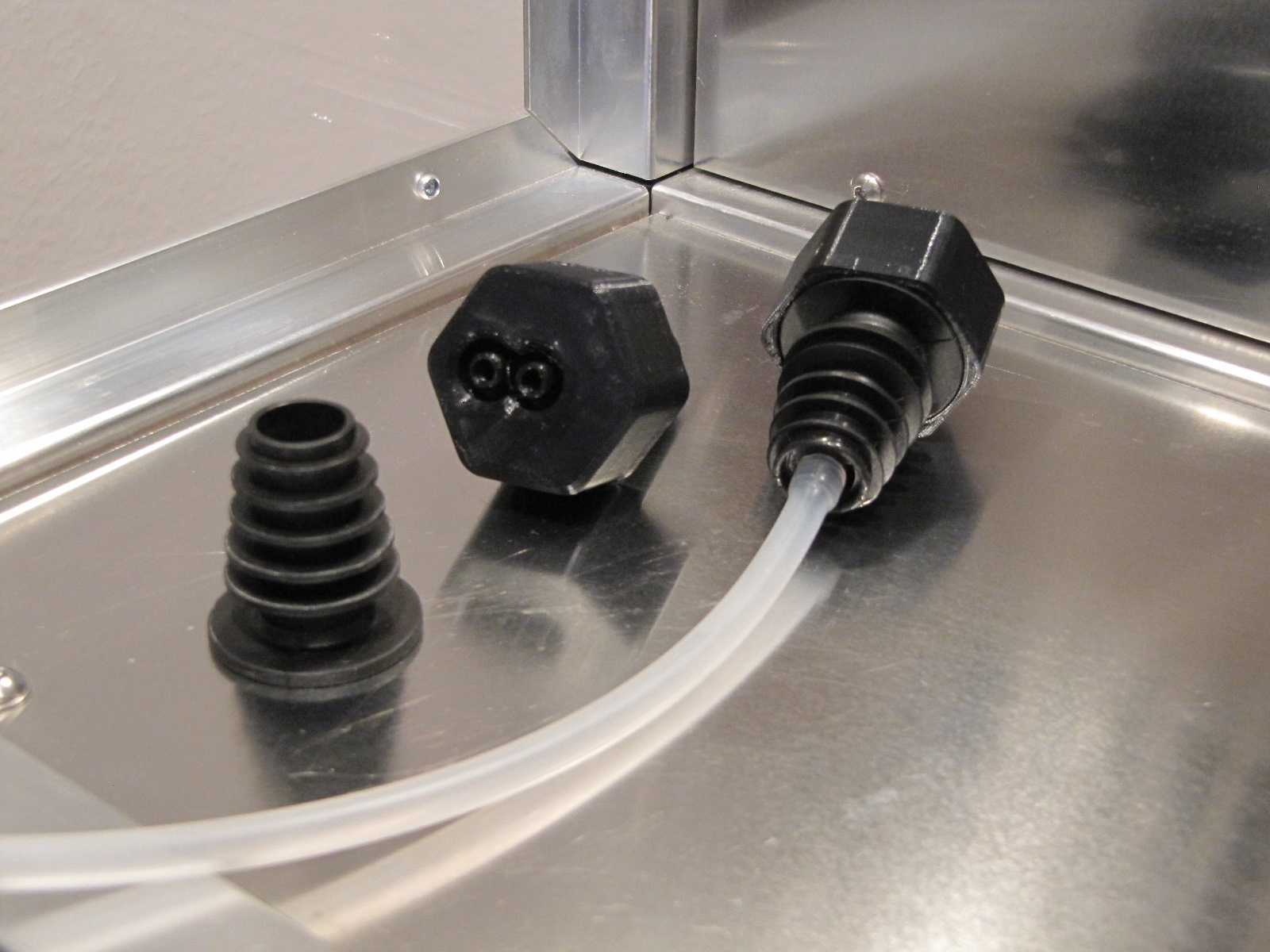
Stopfen
Die Stopfen bestehen aus einem 3D-gedruckten Kern und einer konischen
Dichtung. Die Dichtung ermöglicht es, mit einer Art von Stopfen
verschiedene Getränkeflaschen anzuschließen. Die Dichtungen können aus
dem Gastronomiebedarf bezogen werden. Beim Druck der Kerne sollte
lebensmittelechtes Filament verwendet werden. Auf einer Seite des
Stopfen werden die Schläuche angeschlossen, die zu den Ventilen führen
(Wichtig: Luft- und Getränkeschläuche nicht verwechseln!). Auf der
anderen Seite des Stopfens wird ein Stück Silikonschlauch angeschlossen,
das bis zum Boden der Flasche reicht.
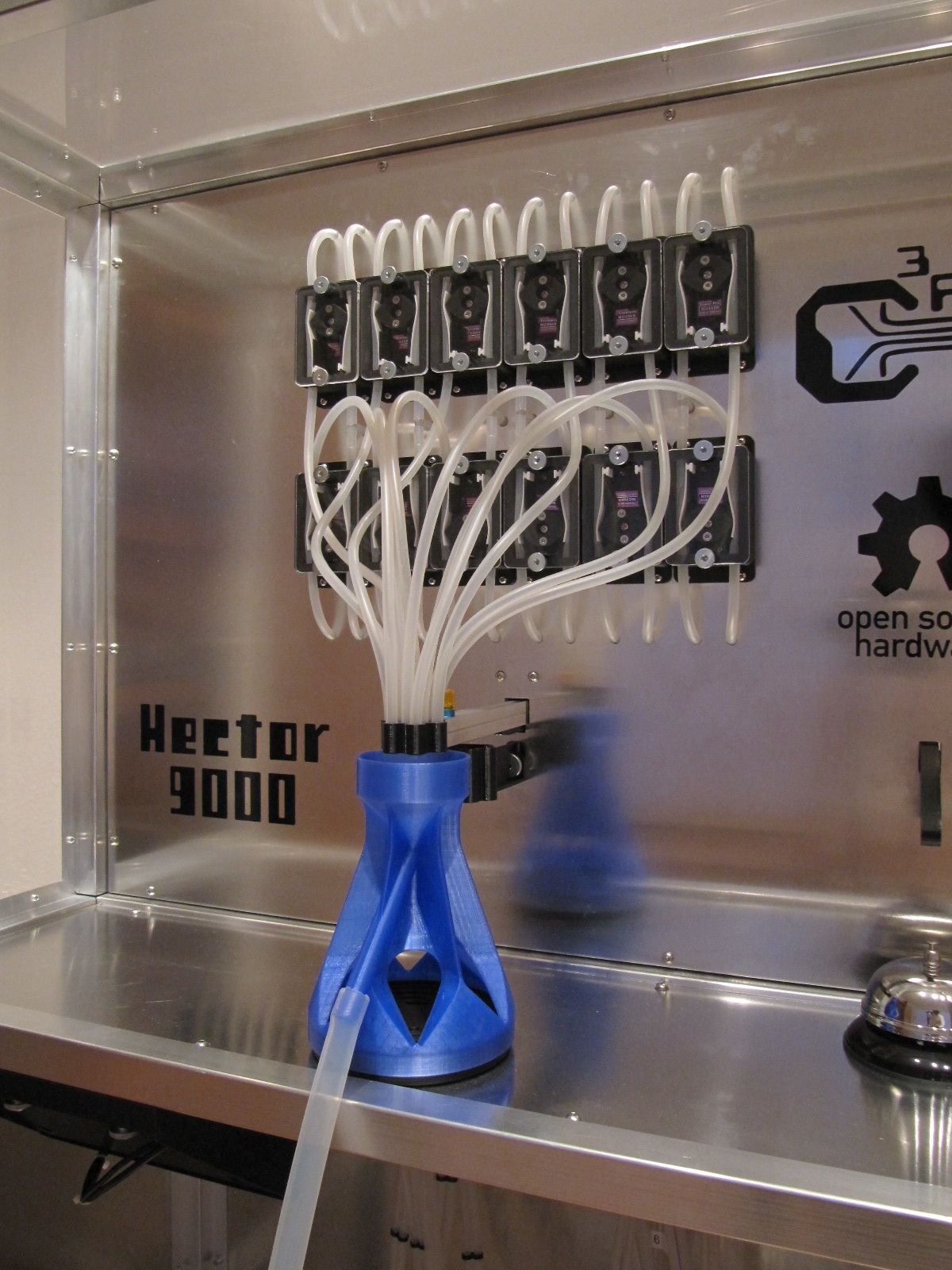
Spültrichter
Da zum Spülen der Schläuche eine Menge Wasser und Zeit notwendig ist,
macht es wenig Spaß, während des Spülprogramms die ganze Zeit neben
Hector zu stehen und volle Gläser auszuleeren. Wir haben deswegen einen
Spültrichter konstruiert, der anstelle eines Glases auf die Waage
aufgesetzt wird und das Abwasser direkt in einen Eimer oder Ausguss
befördert. Der Spültrichter kann ohne Support gedruckt werden. Die
Schlauchtülle ist für einen Silikonschlauch mit 10 mm Innendurchmesser
konzipiert.
Gehäuse
Das Gehäuse besteht aus 25 mm-Aluminiumprofilen, die mit
Aluminiumblechen und PMMA-Platten beplankt wurden. Das Blech, an dem die
Waage befestigt wurde, sowie das Blech, welches die Ventile trägt,
wurden zusätzlich mit einer MDF-Platte verklebt. Vor dem Verkleben
wurden auf der Vorderseite der MDF-Platten Einschlagmuttern eingesetzt,
um später die Hutschienen und die Pumpe zu befestigen. Die PMMA-Platten
und ein Großteil der Bleche wurden mit 4 mm-Blindnieten befestigt. Die
Befestigung der Rückwand erfolgt durch M4-Schrauben. Als Gegenstück zu
den Schrauben wurden in die Profile Blindnietmuttern eingesetzt. Es wird
dringend empfohlen, zur Bearbeitung der Bleche und Profile spezielle
Blechbohrer zu verwenden, ansonsten kann es zu Problemen beim Einsetzen
der Nieten kommen. Das Gehäuse ist in der Stückliste nicht
berücksichtigt, hier soll jeder seiner Kreativität freien Lauf
lassen.[^1]
Display
Zur Auswahl der Drinks haben wir uns für ein 7"-Display mit
Touch-Funktion über USB entschieden. Die USB-Variante ist notwendig, da
die GPIOs für andere Funktionen genutzt werden. Das Display ist an einer
Querstrebe des Gehäuses befestigt. Für den Transport kann das Display in
das Gehäuse gedreht werden (Abb.
[display_half_in]). In dem gedruckten Gehäuse für das Display
sind 3 Löcher für die Montage an dem Rahmen. Für die Befestigung werden
nur zwei Löcher benötigt: das mittlere Loch und ein äußeres. Das Display
wird mittels Blindnietmuttern und Rändelschrauben mit dem Rahmen
verschraubt. Um das Display zu drehen, wird die äußere Schraube entfernt
und die mittlere Schraube gelöst.
2 - Elektronik
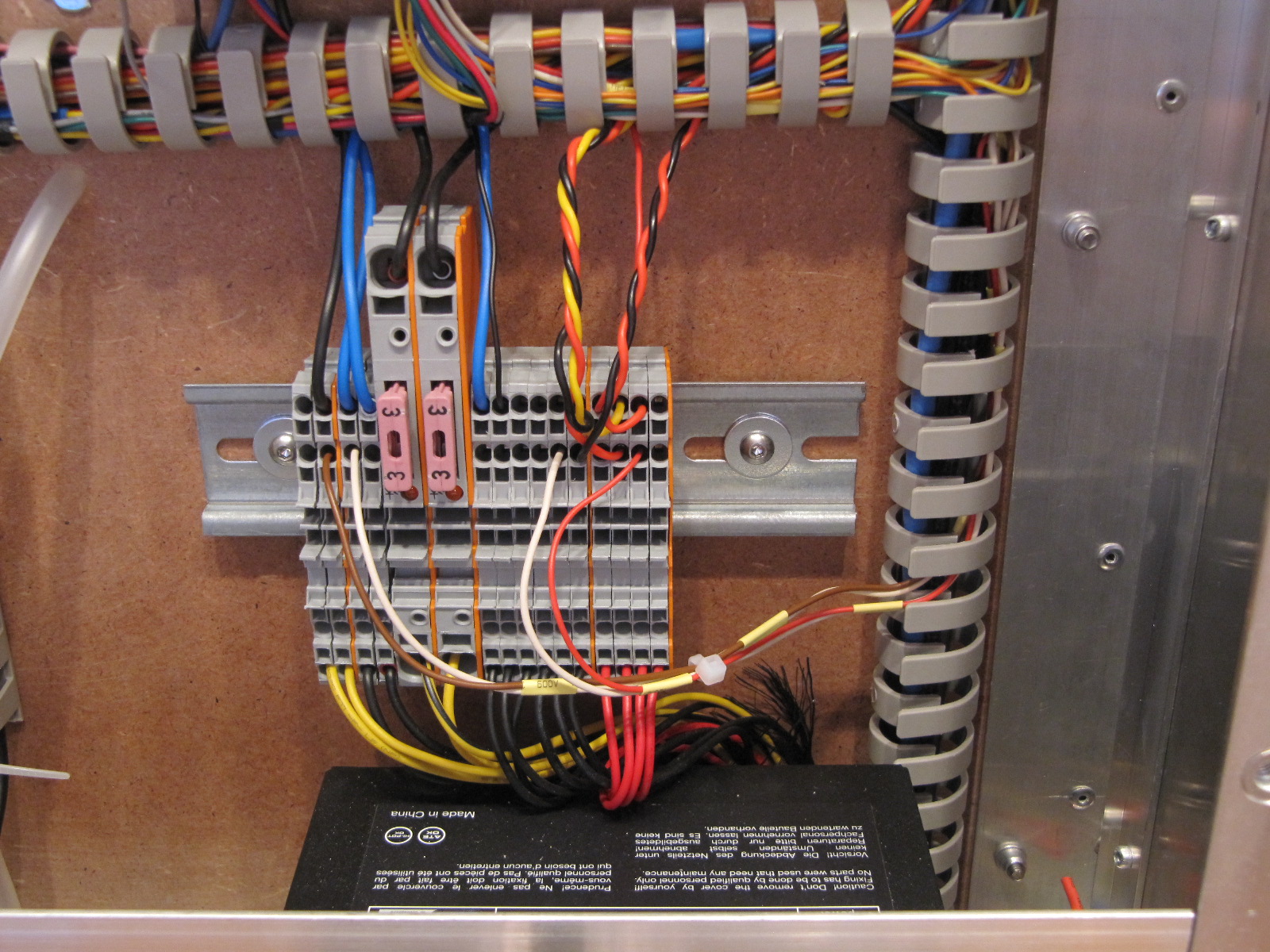
Allgemeine Hinweise
Wir haben uns entschieden, die Spannungsversorgung von Hector 9000 durch
ein PC-Netzteil zu realisieren. Es ist empfehlenswert, die
Spannungsausgänge des Netzteils auf Reihenklemmen zu legen und die
Kabelführung in Verdrahtungskanälen vorzunehmen. Die Versorgungsspannung
der LED-Streifen haben wir, ebenfalls auf Reihenklemmen, abgesichert.
Außerdem lohnt es sich, die Verbindungen zwischen den Modulen durch
aufgecrimpte Stecker herzustellen.
Schaltung
Die Verschaltung der einzelnen Komponenten (Abb.
15)
ist relativ simpel. Wir empfehlen, das HX711-Board möglichst nah am
Raspberry Pi zu platzieren, um die I^2^C Leitungen kurz halten zu
könnnen. Für die Beleuchtung wurden zwei LED-Streifen (WS2812B) parallel
an einen GPIO des RPi gehängt. Pro Strang sind 15 LEDs im unteren
Bereich (Getränke) und 30 LEDs im oberen Bereich des Gehäuses
angeordnet. Die Pinbelegung des Raspberry Pi kann Abb.
16 entnommen werden. Das optionale
Rundumlicht muss über einen Transistor geschaltet werden (Abb.
17).
3 - Teile
In der Teileliste sind nur Komponenten aufgeführt, die zur Fertigung der
einzelnen Baugruppen notwendig sind. Kabel, Stecker, Hutschienen,
Verdrahtungskanäle, [Material zur Befestigung der Baugruppen im
Gehäuse]{.underline}, etc. müssen je nach Gehäuse individuell
zusammengestellt werden. In der Spalte Quelle ist aufgeführt, wo wir
die Teile bezogen haben. Diese Quellen sind keine Werbung für bestimmte
Verkäufer oder Plattformen, sondern sollen lediglich Hinweise darauf
geben, wo das Material grundsätzlich zu beziehen ist.
Teileliste Waage
Anzahl
Bezeichnung
Kommentar
Quelle
1
Überlaufgitter
Scale_overflow_grid.stl
3D-gedruckt
1
Überlaufrohr
Scale_overflow_pipe.stl
3D-gedruckt
1
Waagschale
Scale_pan.stl
3D-gedruckt
1
Abstandshalter
Scale_spacer.stl
3D-gedruckt
1
Gehäuse
Scale_cover.stl
3D-gedruckt
1
Deckel
Scale_lid.stl
3D-gedruckt
1
Kabelverschraubung M10
eBay
4
Schraube für Thermoplaste 3x10
Wegertseder
1
Wägezelle 1 kg mit HX711-Board
Amazon
Teileliste Pumpe
Anzahl
Bezeichnung
Kommentar
Quelle
1
Sockel
Schego_830_mount.stl
3D-gedruckt
1
Membranpumpe Schego 830
Amazon
2
Streifen aus Moosgummi 13 mm $\times$ 70 mm
Bastelladen
2
U-Profil Aluminium 13 mm $\times$ 8 mm $\times$ 105 mm
In dem Video wird gezeigt wie das Image vom Hector9000 auf eine SD-Karte geschrieben wird und wie die erste Einrichtung vorgenommen werden muss.
Die wichtigsten Punke:
Bei der einrichtung des Benutzers sollte der name “pi” sein.
Da das RPI-Image nicht mehr mit einem Defaultuser kommt muss dieser beim ersten Bootvorgang selber ausgewählt werden.
Sicherstellen dass I2C eingerichtet ist. -> RPI Config in der Konsole aufrufen und dort einrichten.
Danach können die beiden Skripte ausgeführt werden.